Sciences Indusrielles
Automatique : introduction
Cours (2ème partie)
| 2 Systèmes dynamiques, Représentations ……………………………………………………………………………………. | 1 | ||
| 2.1 Systèmes dynamiques……………………………………………………………………………………………………… | 1 | ||
| 2.1.1 | Système instantané …………………………………………………………………………………………………….. | 1 | |
| 2.1.2 | Système dynamique……………………………………………………………………………………………………. | 1 | |
| 2.2 Systèmes continus, linéaires et invariants. …………………………………………………………………………. | 3 | ||
| 2.2.1 | Système continu ………………………………………………………………………………………………………… | 3 | |
| 2.2.2 | Représentation des systèmes ……………………………………………………………………………………….. | 3 | |
| 2.2.3 | Systèmes linéaires ……………………………………………………………………………………………………… | 3 | |
| 2.2.4 | Systèmes invariants……………………………………………………………………………………………………. | 7 | |
| 2.2.5 | Les systèmes réels ……………………………………………………………………………………………………… | 7 | |
| 2.3 Représentation d’un système linéaire continu et invariant……………………………………………………. | 7 | ||
| 2.3.1 | Représentation par équations différentielles………………………………………………………………….. | 8 | |
| 2.3.2 | Méthodes de résolution d’équations intégro-différentielles par transformée de Laplace ……… | 9 | |
| ************** |
2 SYSTEMES DYNAMIQUES, REPRESENTATIONS
2.1 Systèmes dynamiques.
2.1.1 SYSTEME INSTANTANE
On dit qu’un système est instantané si les grandeurs physiques de sortie dépendent uniquement et instantanément des grandeurs d’entrée, cette dépendance n’évoluant pas avec le temps.
Exemples :
La relation courant tension dans une résistance est un phénomène instantané, ne dépendant pas du temps. Le système est instantané, on peut qualifier les relations entrées sortie par des coefficients constants appelés gain ou gain pure.
En réalité, il existe peu de systèmes instantanés car tout effet présente une certaine inertie ou mémoire. L’appellation « système instantané » relève donc souvent de l’approximation. Elle est justifiée lorsque le temps de réaction est négligeable devant la durée de transition de l’information dans les autres systèmes environnants (cette notion est donc excessivement relative). Par exemple, une résistance électrique (entrée tension, sortie en courant) sera modifiée par un coefficient constant pour une certaine gamme de fréquence. Lorsque la fréquence croît, il devient nécessaire de prendre en compte les effets d’inductance ou de capacité qui conduisent alors à représenter son comportement par une équation différentielle, donc à considérer un comportement dynamique.
LES SYSTEMES AUTOMATISES Limites du modèle : Systèmes linéaires continus et invariants (1ère partie)
2.1.2 SYSTEME DYNAMIQUE
La notion de système dynamique prend en compte ces phénomènes d’inertie et de mémoire (inertie mécanique, inertie thermique) et dans ce cas les grandeurs de sortie dépendent des valeurs présentes et passées des grandeurs d’entrées. C’est notamment le cas des systèmes régis par des équations intégro-différentielles.
Cette mémoire passé est généralement de durée infinie, tout en s’atténuant le plus souvent selon les modes exponentiels. Ainsi, on considère en pratique qu’un système dynamique à une mémoire finie dont la durée fixe le temps de réponse.
2.1.2.1 Exemple de système dynamique
Il s’agit d’une masse M soumise à une action mécanique F(t) de direction l’axe y. Ce solide de masse M est lié à un support fixe par un ressort de raideur K et un amortisseur de coefficient de frottement visqueux f. Au repos, le solide a une position y0 et que la norme de F(t)=f 0 est nulle.
L’entrée et la sortie du système sont définie par le schéma fonctionnel ci-dessous.

Lors de l’intégration, on montre qu’il suffit de connaître la position de la vitesse de la masse M à l’instant initial pour être en mesure de décrire l’évolution ultérieure de la position y(t),en supposant connue également connue F(t) pour t>t 0. Ces deux grandeurs de position et de vitesse à l’instant t0 résument le passé du système. On peut illustrer l’effet de mémoire de ce système en appliquant une force impulsionnelle (un Dirac), le système oscille encore bien après la disparition de la force.
2.2 Systèmes continus, linéaires et invariants.
2.2.1 SYSTEME CONTINU
Un système continu par opposition d’un système discret (hors programme en C.P.G.E.), lorsque les variations des grandeurs physiques le caractérisant sont des fonctions à temps continu et que l’on peut donc définir ces grandeurs à tout instant. On par aussi de système analogique.
La plupart des systèmes sont continus du point de vue macroscopique. Mais, par exemple, un système informatique n’est pas continu car il ne peut traiter que des échantillons des signaux continus qui lui sont soumis : on parle dans ce cas d’un système échantillonné.

2.2.2 REPRESENTATION DES SYSTEMES
Dans l’étude d’un système, on cherche à établir les » relations » existant entre ses entrées et ses sorties. Des relations mathématiques peuvent représenter ces » relations » entrées-sorties du système. Cet
ensemble de relations mathématiques représente un modèle mathématique du système.
Dans le cas où le modèle mathématique du système est un ensemble ( ou système ) d’équations différentielles linéaires et à coefficients constants on parle d’un système continu, linéaire et invariant.
Exemple : Soit le système monovariable :

2.2.2.1 Exemples d’équations différentielles :
Continuité : les fonctions liées par l’équation différentielle étant continues, le système qu’elle représente est dit continu.

2.2.3 SYSTEMES LINEAIRES
L’hypothèse de linéarité, relative au comportement des systèmes, traduit simplement que » l’effet est proportionnel à la cause « .
Cette notion, bien ancrée dans les esprits, repose donc en fait sur les principes de proportionnalité et de superposition.
Dans le cas où le modèle mathématique représentant le système étudié forme un ensemble d’équations différentielles linéaires on aurait affaire à un système continu et linéaire.
2.2.3.1 Propriétés
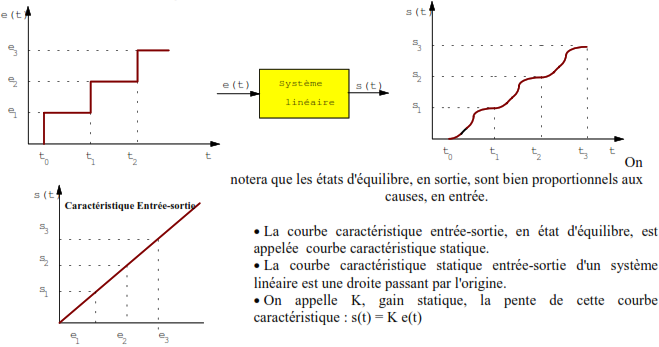
Si à l’entrée d’un système linéaire on applique e1, une grandeur constante, et que l’on obtienne, à la sortie du système, après un certain temps d’attente, s1, une autre grandeur constante alors :
En appliquant à l’entrée du système k.e1, une grandeur constante proportionnelle à e1, on obtiendra, à la sortie du système, après un certain temps d’attente, k.s1, grandeur proportionnelle à s1.
2.2.3.1.1 Schéma traduisant le comportement, dans le temps, d’un système linéaire.
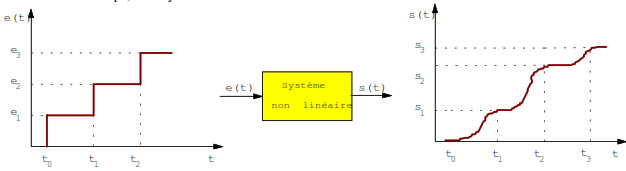
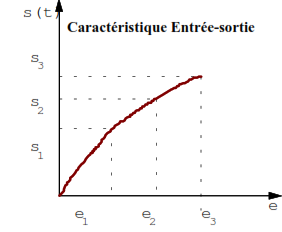
2.2.3.1.1 Schéma traduisant le comportement, dans le temps, d’un système non linéaire.
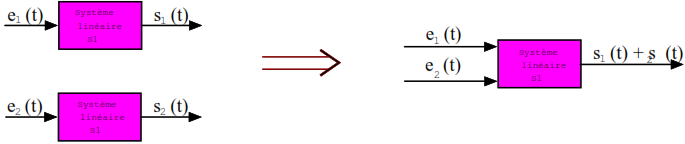
2.2.3.2 Principe de superposition
Si à l’entrée du système linéaire on applique la fonction e1(t) et que l’on obtienne, à la sortie s1 (t). Si ensuite à l’entrée du même système linéaire on applique e2(t) et que l’on obtienne, à la sortie s2(t). Alors en appliquant à l’entrée du système e1 (t) et e2 (t), on obtiendra, à la sortie du système s1 (t) + s2 (t).
Représentation sous forme de schéma fonctionnel du Principe de superposition
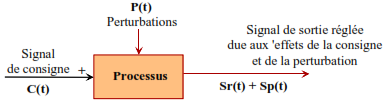
2.2.3.3 Conséquence pratique sur l’étude des systèmes multi-variables
Cela permet de simplifier l’étude d’un système soumis à plusieurs entrées, par exemple une consigne et une perturbation.
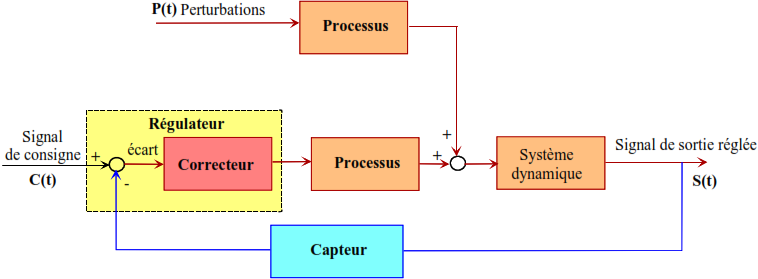
Ainsi pour une modélisation linéaire on pourra composer le schéma fonctionnel ci-dessus en deux études.
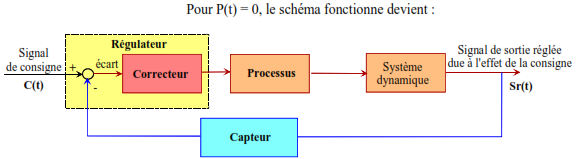
2.2.3.3.1 Étude en poursuite
Dans cette étude, on considère que la perturbation P(t) et toujours nulle. On recherchera Sr(t) (effet de la consigne sur la sortie). Pour ce faire :
Pour étudier le régime transitoire, on étudie la stabilité et le temps de réponse.
Pour étudier le régime permanent, on recherchera la précision statique.
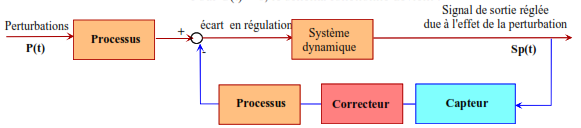
2.2.3.3.2 Étude en régulation
Dans cette étude, on considère que la consigne C(t) et toujours nulle. On recherchera Sc(t) (effet de la perturbation sur la sortie).
Il est inutile d’étudier le régime transitoire en perturbation, si le système est stable en poursuite, alors, il l’est en régulation.
De plus le critère de rapidité défini par le temps de réponse à 5% n’est évaluer qu’en poursuite.
On étudiera donc que la précision, à savoir si dans le temps, la perturbation modifie la sortie. Un système bien régulé est un système tel que dans le temps, la sortie reste inchangée.
2.2.3.3.3 Étude d’un système multi-variables
Puisque le système est linéaire, en appliquant le principe de superposition, on aura donc :
2.2.3.3.3.1 Réponse indicielle d’un système multi-variables
Explication de la procédure de teste ayant conduit aux courbes ci-dessous.
On supposant que le système est stable. À l’instant t 0, il est envoyé sur la consigne et échelon de poids E0, une durée de (tr – t0) plus tard, il est envoyé en perturbation un échelon de poids –P0.
Système est dit mal régulé, alors on obtient la réponse suivante :
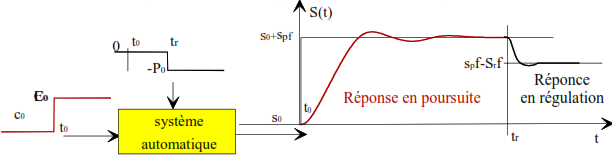
On remarque que le système ne revient pas en position après avoir appliqué la perturbation.
Par exemple, la suspension d’une voiture Peugeot ne revient pas en position lorsque l’on met un sac de 50 kg de ciment dans le coffre.
Système est dit bien régulé, alors on obtient la réponse suivante :
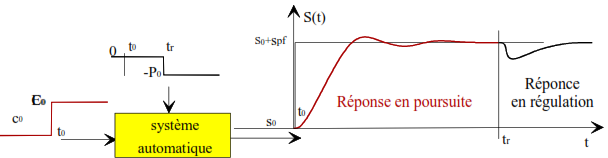
On remarque que le système revient en position après avoir appliqué la perturbation.
Par exemple, la suspension d’une voiture Citroën (équipée du système SCMAC) revient en position lorsque l’on met un sac de 50 kg de ciment dans le coffre. Le système de maintient d’assiette (hauteur) du véhicule est donc bien régulé.
2.2.4 SYSTEMES INVARIANTS
Un système invariant a des caractéristiques qui ne se modifient pas dans le temps. Autrement dit c’est un système ayant des composants qui ne vieillissent pas.
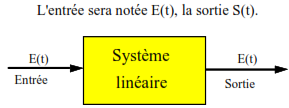
Si à l’entrée du système invariant on applique la fonction e (t) et que l’on obtienne à la sortie s (t), alors :
pour tout décalage temporel τ, si on applique e (t – τ ) on obtiendra à la sortie s (t – τ ) .
2.2.5 LES SYSTEMES REELS
En toute théorie, les systèmes réels « dit physiques » ne sont :
- ni continus ( point de vue microscopique )
- ni linéaires ( les courbes caractéristiques statiques ne sont jamais rigoureusement des droites)
- ni invariants ( vieillissement des composants )
Dans la pratique nous nous ramènerons au cas continu, linéaire et invariant par des hypothèses simplificatrices le plus souvent justifiées.
2.3 Représentation d’un système linéaire continu et invariant
Pour réaliser une commande automatique d’un système, il est nécessaire d’établir les relations existant entre les entrées et les sorties. L’ensemble de ces relations s’appelle « modèle mathématique » du système.
En utilisant le principe de superposition, les systèmes linéaires multi-variables se ramène à plusieurs études de système monovariable. C’est pourquoi dans la suit de ce document, nous nous limiterons aux systèmes monovariables.
2.3.1 REPRESENTATION PAR EQUATIONS DIFFERENTIELLES
On représente classiquement l’évolution d’un système dynamique linéaire et invariant par une équation différentielle linéaire à coefficients constants liant les grandeurs d’entrée et de sortie :

Les cas pratiques rencontrés imposent d’avoir, m ≤ n est appelé l’ordredu système
La résolution d’une telle équation différentielle à second membre s’obtient en ajoutant une solution particulière à la solution générale sans second membre.
- La solution générale s’obtient par résolution de l’équation sans second membre :

- Pour une solution particulière de l’équation avec second membre, on choisit la forme de la solution
connaissant E(t), puis on détermine les constantes par identification.
La réponse en régime établi (ou régime définitif ou permanent) d’un système linéaire à une entrée de type donné est un signal de même nature que l’entrée.
Par exemple :
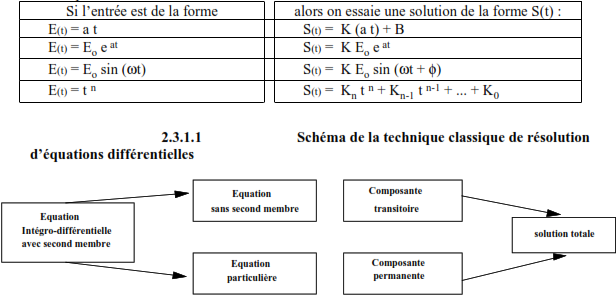
Ainsi :
- Le régime libre ou transitoire ne dépend que du système et de ses conditions initiales.
- Le régime forcé ou permanent est de même nature que celui appliqué à l’entrée du système.
- Dans les systèmes stables le régime libre ou transitoire s’annule au bout d’un certain temps.
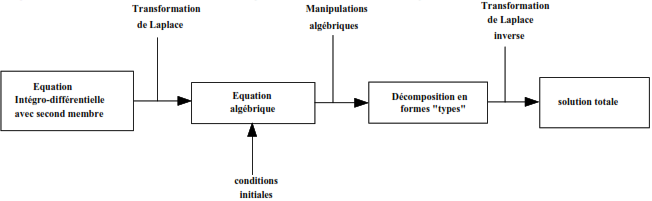
2.3.2 METHODES DE RESOLUTION D’EQUATIONS INTEGRO-DIFFERENTIELLES PAR TRANSFORMEE DE LAPLACE
Nous allons maintenant introduire une technique permettant de se ramener à de simples opérations algébriques lors de la résolution. Cette technique suppose au départ une transformation dite de Laplace, puis à l’arrivée une transformée inverse pour obtenir la solution temporelle :