Sciences Indusrielles
Systèmes linéaires continus invariants
Performance des systèmes asservis
SYSTEMES LINEAIRES CONTINUS INVARIANTS
PERFORMANCES DES
SYSTEMES ASSERVIS
1 Stabilité des systèmes asservis
1.1 Notion de stabilité
La stabilité est communément reconnue comme étant associée à la notion d’équilibre :
Prenons les deux positions d’équilibre d’un pendule :
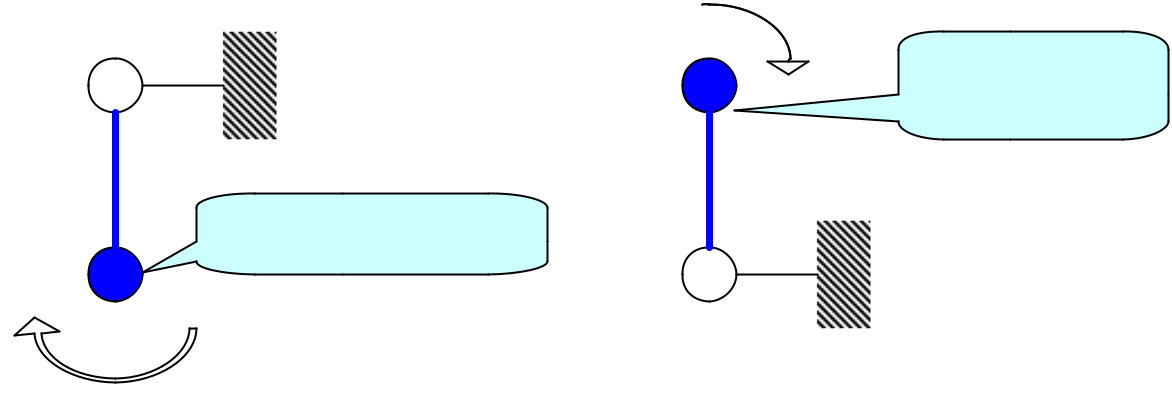
En équilibre
instable
En équilibre stable
A gauche si on écarte le pendule de sa position d’équilibre, il finira par la reprendre.
A droite, si on écarte le pendule de sa position d’équilibre, il s’en écarte définitivement.
On peut élargir cette notion :
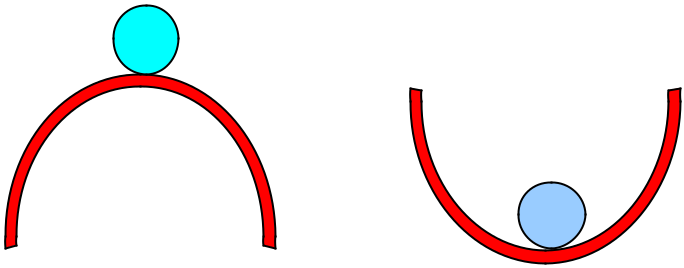
Etudions le mouvement d’une bille reposant sur différentes formes.
|
Equilibre instable |
Equilibre stable |
Equilibre indifférent |
||

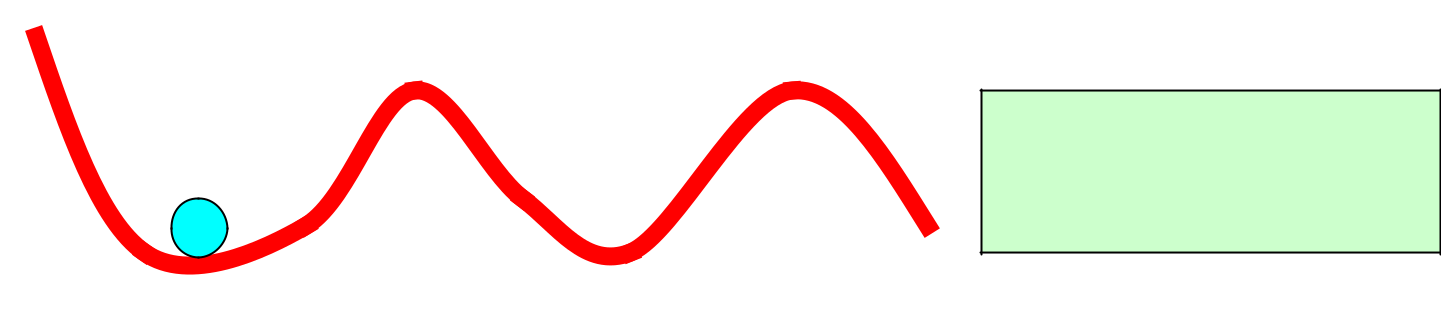
Equilibres multiples stable
et instable suivant le
domaine d’évolution
Il faut donc étudier la qualité de la stabilité d’un système asservis de façon plus précise.
Page 1 Emmanuel FARGES Ó EduKlub S.A.
Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la consultation individuelle et privée sont interdites.
Sciences Indusrielles
Systèmes linéaires continus invariants
Performance des systèmes asservis
1.2 Aspect mathématique
Un système est stable si à toute entrée bornée, le système répond par une sortie bornée
Un système est stable si sa réponse libre (équation différentielle sans second membre) tend vers 0 lorsque le temps tend vers l’infini.
On a vu que toute fonction de transfert et donc en particulier la fo nction de transfert globale d’un système pouvait se mettre après décomposition en éléments simples sous la forme :
|
H ( p) = å |
ci |
avec pi Σ les pôles de la fonctions de transfert globale du système. |
|
|
p – pi |
|||
|
i |
Or après transformée inverse de Laplace, on s’aperçoit que :
- Les pôles nuls engendrent des solutions de la forme t n (non borné)
- Les pôles réels engendrent des solutions de la forme e(pi t ) (borné si pi < 0)
- Les pôles complexes qui sont nécessairement conjugués engendrent des solutions de la
|
(Re(pi )t ) |
sin (w i t +ji ) (borné si Re ( pi ) < 0) |
|
|
forme : e |
La condition générale de stabilité est donc que les pôles de la fonction de transfert globale du système soient à partie réelle strictement négative.
Ce critère est une condition de stabilité mais ne permet pas de quantifier la qualité de cette éventuelle stabilité, ce que nous ferons plus tard.
1.3 Critère algébrique de ROUTH
Ce critère algébrique permet de savoir si un système est stable ou non sans en déterminer la qualité. Il permet de savoir si les zéros d’un polynôme sont à parties réelles négatives ou non. Pour la stabilité on s’intéresse aux pôles de la fonction de transfert, donc aux zéros du
N ( p)
polynôme au dénominateur : D ( p) avec H ( p) =
Posons : D( p) = bn pn + …….. + b1 p + b0
Les zéros de D(p) donc les pôles de la fonction de transfert sont à parties réelles strictement négatives si deux conditions :
Condition 1 : Tous les coefficients bi sont positifs.
Condition 2 : Tous les coefficients de la première colonne du tableau ci-dessous doivent être positif.
Le tableau se constitue de la façon suivante :
Les deux premières lignes se remplissent avec les coefficients du polynôme D(p).
Les lignes suivantes se déduisent des deux immédiatement précédentes, de la façon suivante :
Page 2 Emmanuel FARGES Ó EduKlub S.A.
Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la consultation individuelle et privée sont interdites.
Sciences Indusrielles
Systèmes linéaires continus invariants
Performance des systèmes asservis
|
pn |
bn |
bn-2 |
bn-4 |
||||||||||||||||
|
pn-1 |
bn-1 |
bn-3 |
bn-5 |
||||||||||||||||
|
Pn-2 |
c = |
b b |
– b b |
d = |
b b |
– b b |
etc |
||||||||||||
|
n-1 n– 2 |
n n-3 |
n-1 n -4 |
n n-5 |
||||||||||||||||
|
bn -1 |
bn-1 |
||||||||||||||||||
|
cbn -3 – dbn-1 |
… |
… |
|||||||||||||||||
|
c |
|||||||||||||||||||
|
p1=p |
… |
… |
… |
||||||||||||||||
|
p0=1 |
… |
… |
|||||||||||||||||
1ère colonne
Remarque : si les coefficients n’existent pas, on y met des zéros et on ne va pas plus loin.
Remarque : Si un zéro apparaît dans la première colonne, on ne peut plus calculer les autres lignes. On s’intéresse donc aux zéros du polynôme (p+a)D(p) qui a les mêmes zéros que D(p) avec –a en plus. Donc si a>0, cela ne change rien a la stabilité de notre système et cela nous permet d’effectuer les calculs (en général on prend a=1).
1.4 Application à un deuxième ordre
On prend un système représenté par un deuxième ordre à retour unitaire dont le schéma bloc est donné ci-dessous :
|
E |
K |
S |
||||||||||
|
+ |
||||||||||||
|
1+ |
2x |
p + |
p2 |
|||||||||
|
– |
||||||||||||
|
w |
w 2 |
|||||||||||
|
0 |
0 |
|||||||||||

|
K |
|||||||||||||||||||||||||||||
|
1 + |
2x |
p + p2 |
K BF |
||||||||||||||||||||||||||
|
FTBF = |
w0 |
w02 |
= |
||||||||||||||||||||||||||
|
1+ |
K |
1+ |
2xBF |
p + p |
2 |
||||||||||||||||||||||||
|
2x |
p2 |
w02BF |
|||||||||||||||||||||||||||
|
1+ |
p + |
w0BF |
|||||||||||||||||||||||||||
|
w02 |
|||||||||||||||||||||||||||||
|
w0 |
|||||||||||||||||||||||||||||
|
K |
x |
||||||||||||||||||||||||||||
|
avec |
K |
BF |
= |
x |
BF |
= |
w |
= w |
1+ K |
||||||||||||||||||||
|
1+ K |
1+ K |
0 BF |
0 |
||||||||||||||||||||||||||






Pôles de la fonction de transfert en boucle fermée (FTBF) :
|
Si xBF |
<1 |
||||||||||
|
les pôles sont : |
–xBF w0 BF |
± jw 0BF |
1- xBF2 |
Re < 0 |
|||||||
|
Si xBF |
> 1 |
||||||||||
|
les pôles sont : |
–xBF w 0 BF |
±w 0 BF |
xBF2 -1 |
< 0 |
|||||||
Conclusion : Un deuxième ordre est toujours stable (encore une fois sans notion de qualité de cette stabilité)
Page 3 Emmanuel FARGES Ó EduKlub S.A.
Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la consultation individuelle et privée sont interdites.
Sciences Indusrielles
Systèmes linéaires continus invariants
Performance des systèmes asservis
1.5 Stabilité des systèmes bouclés
On va chercher à quantifier la qualité de cette stabilité en définissant des marges vis-à-vis de la stabilité limite.
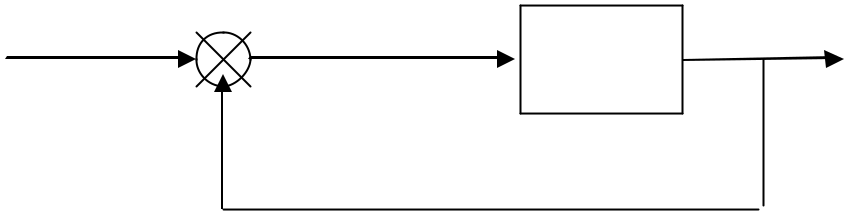
On considère le système bouclé classique :
|
E |
S |
||
 A(p)
A(p)

–
B(p)
|
FTBO = A( p ) B( p) |
et |
FTBF = |
A( p) |
= |
A( p) |
||
|
1+ A( p ) B( p) |
1+ FTBO |
||||||
Faire l’étude de la stabilité de ce système revient à faire l’étude des solutions du polynôme :1 + FTBO = 0 soit FTBO = -1
Donc l’étude de la stabilité se fait dans ce cas sur la FTBO
Le point -1 est appelé point critique
Condition pratique de stabilité : Le but est de s’écarter le plus possible du point critique pour
(– jp ) ìH dB = 0dB
lequel : – 1 = e . Soit í
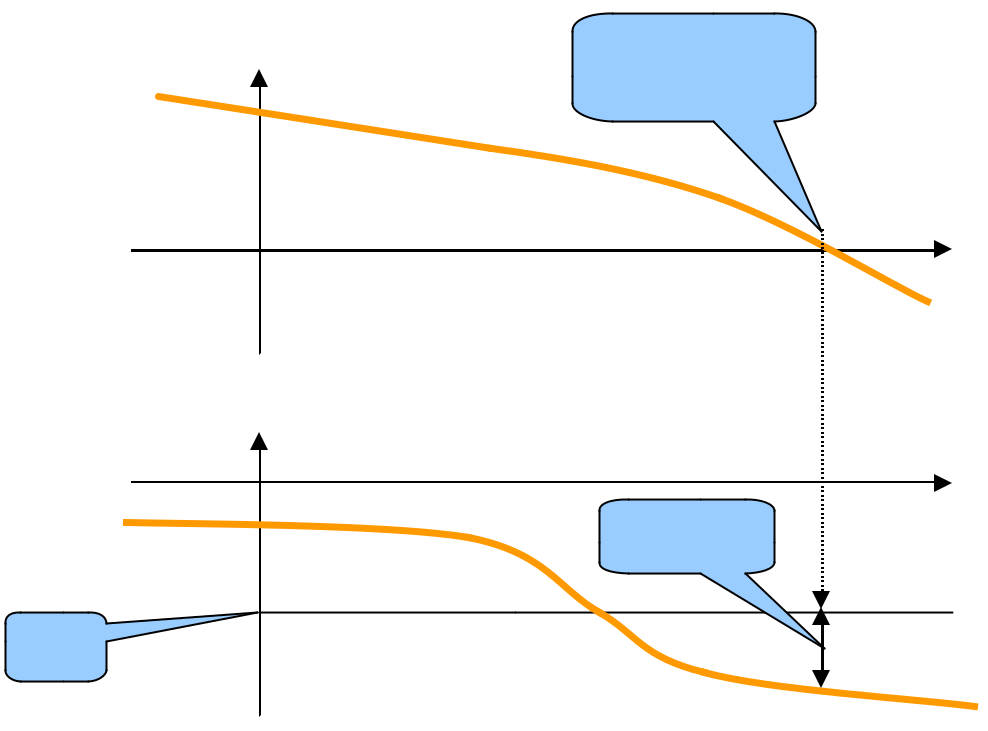
Marge de Gain :Valeur courante :10dB
On lit la marge de gain sur les diagrammes de Bode de la FTBO
H dB (w)
MG < 0
w
j (w )
w
-180°
Point critique
en phase
On se place au point critique sur le diagramme de phase j (w ) = -180° et on lit la
marge de gain sur le diagramme de gain.
La marge de gain est l’écart entre 0dB et le gain au point critique en phase.
- Si on amplifie au point critique, le système est instable : MG<0.
- Si on atténue au point critique , le système est stable avec une marge MG>0
Page 4 Emmanuel FARGES Ó EduKlub S.A.
Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la consultation individuelle et privée sont interdites.
Sciences Indusrielles
Systèmes linéaires continus invariants
Performance des systèmes asservis
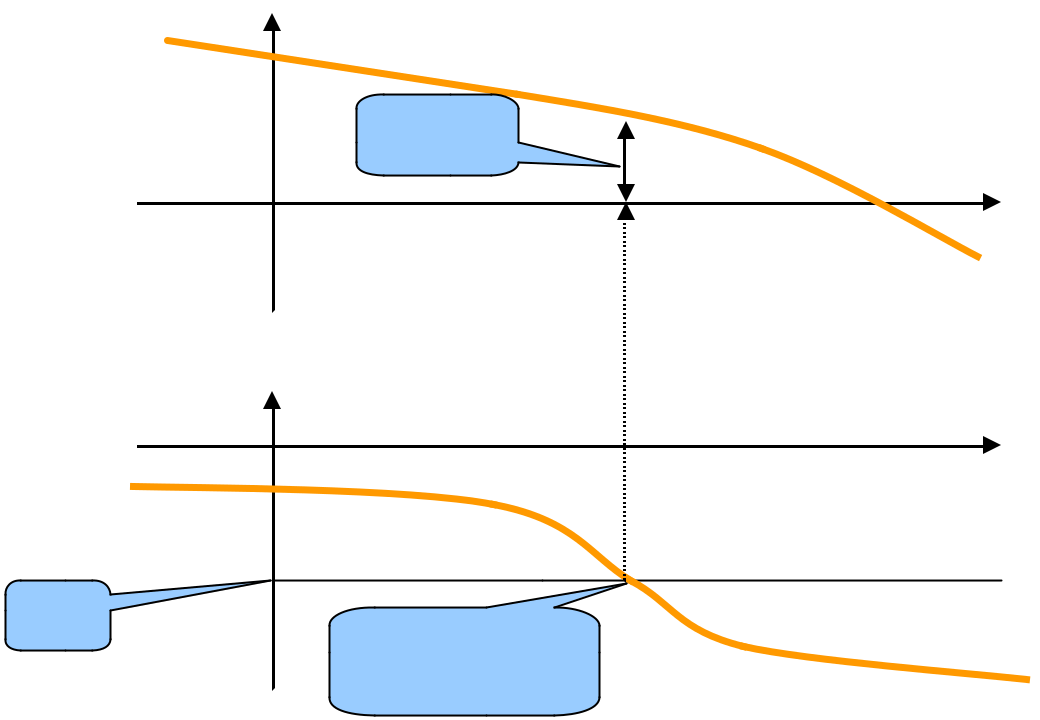
Marge de Phase :Valeur courante 45°
On lit la marge de phase sur les diagrammes de Bode de la FTBO
|
H dB |
(w) |
Point critique |
|
|
en gain 0 dB |
|||
w
j (w )
w
Mj < 0
-180°
On se place au point critique en gain (0 dB) et on lit la marge de phase sur le diagramme de phase La marge de phase Mj est
l’écart en -180° et la phase au point critique en gain.
- Si la phase au point critique en gain est inférieure à -180°, alors le système est instable et Mj < 0
- Si la phase au point critique en gain est supérieure à -180°, le système est stable avec une marge de phase Mj > 0
Marge de phase et de gain sur un diagramme de Black :
Elles sont définies de façons identiques mais se lisent différemment, comme suit :
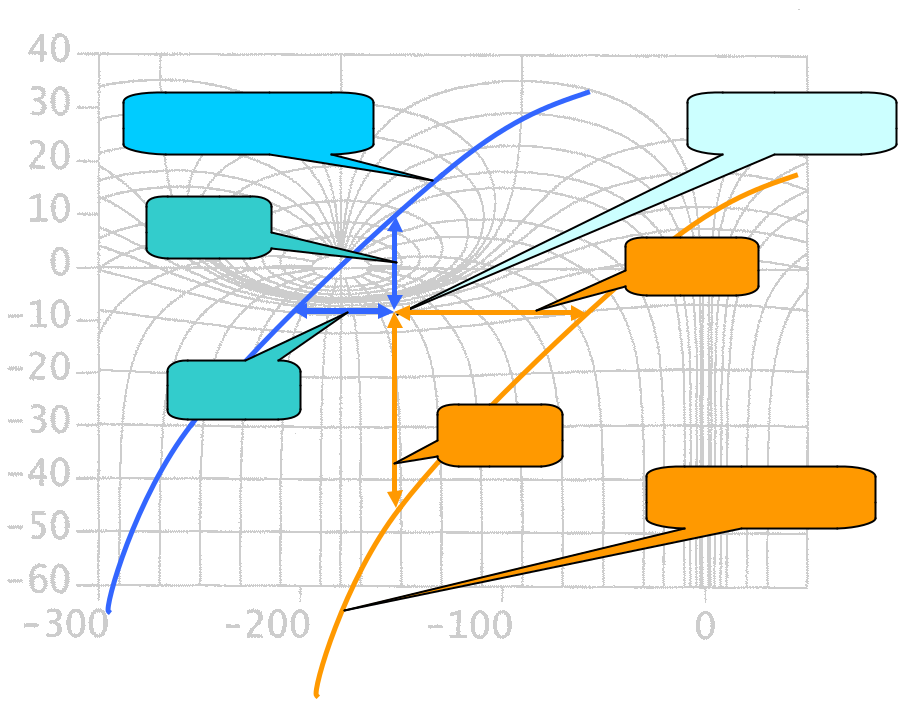
Système instable Point critique
MG<0
Mj > 0
Mj < 0
MG>0
Système stable
Page 5 Emmanuel FARGES Ó EduKlub S.A.
Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la consultation individuelle et privée sont interdites.
Sciences Indusrielles
Systèmes linéaires continus invariants
Performance des systèmes asservis
1. 6 Influence du gain sur la stabilité des systèmes bouclés
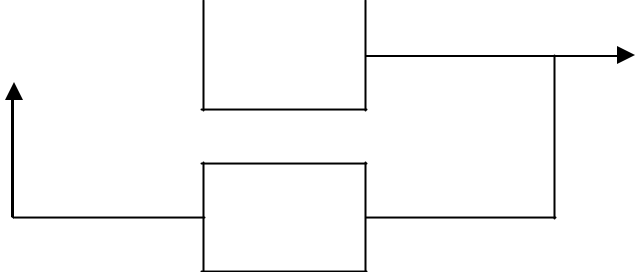
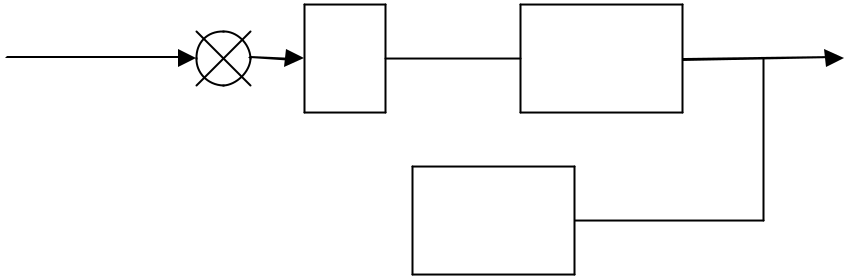
On considère le système bouclé classique avec un correcteur proportionnel K dans la boucle ouverte suivant :
|
E |
+ |
S |
||
|
Sans gain dans la boucle ouverte |
K |
A(p) |
||
|
la FTBO de ce système vaut : |
– |
|||
|
FTBO = A(p) B(p) |
||||
Avec gain dans la boucle ouverte, la
FTBO de ce système devient :
FTBO = K A(p) B(p)
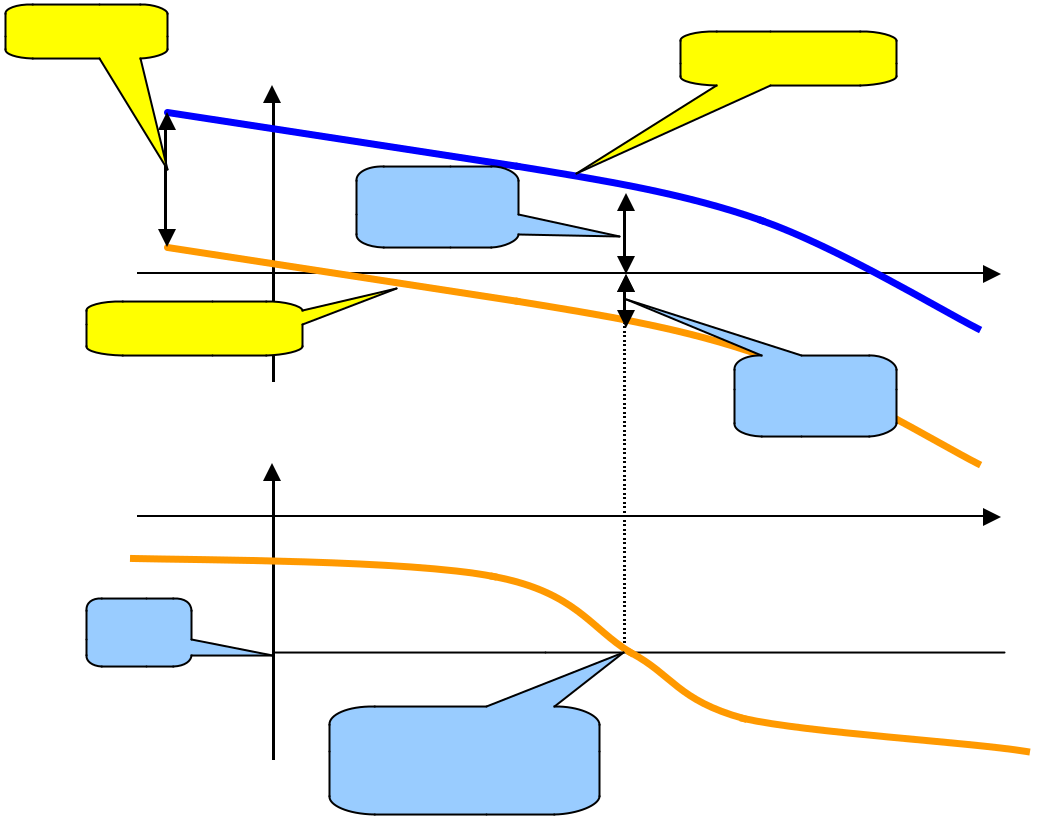
20LogK
 B(p)
B(p)
|
H (w) |
Avec gain K |
Si on augmente le gain en boucle ouverte , la phase de la FTBO reste inchangée, alors que le gain est multiplié par K. Cela veut dire que la courbe de phase dans Bode est la même avec ou sans gain alors que la courbe de gain avec gain se déduit de celle sans gain par translation de 20LogK vers le haut :
On passe donc d’un système stable puisque la marge de gain MG est positive à un système instable puisque la marge MG peut devenir négative avec le correcteur proportionnel (K suffisamment grand) dans la boucle ouverte.
Sans gain K
-180°
dB
MG < 0
w
MG > 0
j ( w )
w
Point critique
en phase
|
E |
+ |
1 |
|||||
|
( |
) |
dans la |
– |
||||
|
p |
|||||||
|
Sans intégration a = 0 |
a |
||||||
boucle ouverte la FTBO de ce système vaut :FTBO = A(p) B(p)
S
A(p)
B(p)
Page 6 Emmanuel FARGES Ó EduKlub S.A.
Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la consultation individuelle et privée sont interdites.

Sciences Indusrielles
Systèmes linéaires continus invariants
Performance des systèmes asservis
Avec intégration dans la boucle ouverte, la FTBO de ce système
1
devient : FTBO = A ( p ) B( p)
L’influence de l’action intégrale est très simple sur les courbes de phase des diagrammes de Bode. En effet la phase d’un intégrateur est constante et vaut -90°. Donc les courbes de Bode sont translatées de -90° vers le bas à chaque fois que l’on rajoute un intégrateur.
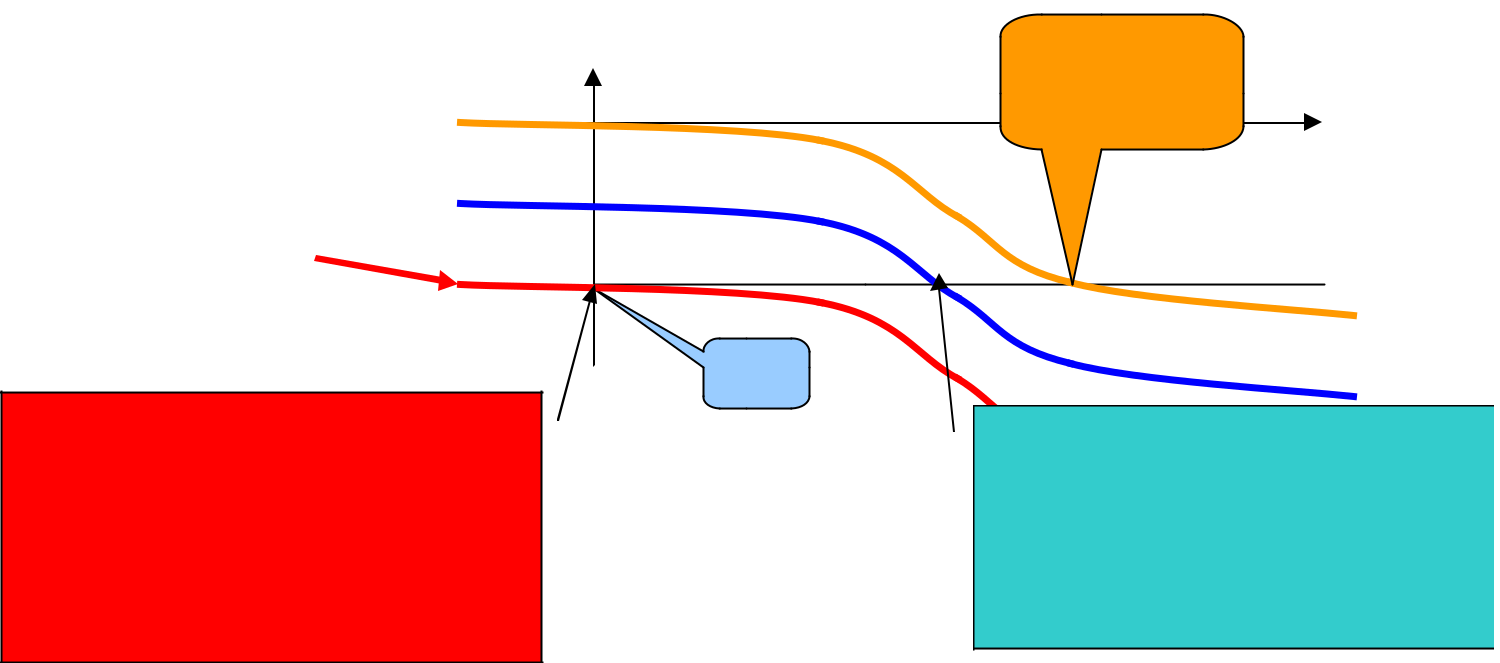
Aucune intégration 
Une intégration 
Seconde intégration
Point critique en phase avec une double intégration déplacé vers la gauche, c’est à dire vers les zones d’amplification au gain statique a MG ® -20LogK
Le système est déstabilisé
|
( |
) |
Point critique |
||
|
j w |
||||
|
en phase sans |
w |
|||
|
intégration |
-180°
Point critique en phase avec une
intégration déplacé vers la
gauche, c’est à dire vers les
zones d’amplification :
Mauvais pour la stabilité
Conclusion : L’action intégrale dégrade la stabilité des systèmes
2 Précision des systèmes asservis.
2.1 Ecart – Erreur – Précision
La précision caractérise l’écart entre la consigne et la valeur atteinte.
|
e = |
lim |
e(t ) – s(t) = lim |
p [E( p) – S ( p)] |
d’après le théorème de la valeur finale. |
|||
|
t ® ¥ |
p ® 0 |
||||||
|
e = |
lim |
pE( p)[1 – H ( p)] |
avec H ( p) = |
FTBF = |
S ( p) |
||
|
E ( p) |
|||||||
|
p ® 0 |
|||||||
Considérons un système à retour unitaire pour regarder la précision d’un système.
|
A( p) = FTBO = |
K BO |
N ( p) |
avec |
||
|
pa |
D ( p) |
||||
pE ( p)
Donc : e = lim
p ®0 1+ FTBO
|
E+ |
e |
A(p) |
||
|
– |
||||
N (0) = D(0) = 0
S
Page 7 Emmanuel FARGES Ó EduKlub S.A.
Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la consultation individuelle et privée sont interdites.
Sciences Indusrielles
Systèmes linéaires continus invariants
Performance des systèmes asservis
2.2 Précision statique
L’erreur statique notée es est l’erreur en régime établie pour une entrée de type
A
échelon : E ( p) =
|
A |
ì |
A |
si a = 0:pasd’intégrationenboucleouverte |
||||||||
|
ï |
|||||||||||
|
Donc : |
es |
= lim |
= í |
1 |
+ KBO |
||||||
|
KBO |
|||||||||||
|
p ®0 |
1 |
+ |
ï |
si a ³1:aumoinsunintégrateurenboucleouverte |
|||||||
|
a |
î0 |
||||||||||
|
p |
|||||||||||
Conclusion :
- L’erreur statique d’un système bouclé est nulle si on a au moins un intégrateur en boucle ouverte.
- L’erreur statique est d’autant plus faible que le gain en boucle ouverte KBO est grand quand il n’y a pas d’intégrateur en boucle ouverte.
2.3 Précision dynamique
L’erreur en vitesse ou précision dynamique ou encore erreur de traînage es est l’erreur en
régime établi pour une entrée rampe du type E ( p) = V p2
|
ì |
¥ si a=0pasd’intégrateurenboucleouverte |
||||||||||
|
V |
ï |
V |
|||||||||
|
ï |
|||||||||||
|
Donc : |
et |
= lim |
= í |
si a=1unint égrateur enboucleouverte |
|||||||
|
KBO |
K |
||||||||||
|
p®0 |
p + |
ï |
BO |
||||||||
|
a-1 |
|||||||||||
|
p |
ï |
si a ³ 2 au moinsdeuxintégrateursenboucleouverte |
|||||||||
|
î0 |
|||||||||||
2.4 Résumé
On peut généraliser la notion de précision en fonction du nombre d’intégrateur dans la boucle ouverte sous forme d’un tableau :
|
Entrée |
Précision, erreur |
0 intégrateur |
1 intégrateur |
2 intégrateur |
3 intégrateur |
||||||||||||
|
Echelon : A u(t) |
Erreur statique |
A |
0 |
0 |
0 |
||||||||||||
|
1+ K BO |
|||||||||||||||||
|
Rampe : V t u(t) |
Erreur en vitesse |
¥ |
V |
0 |
0 |
||||||||||||
|
K BO |
|||||||||||||||||
|
Parabole : |
Erreur en |
¥ |
¥ |
g |
0 |
||||||||||||
|
gt 2u (t ) ² |
accélération |
K BO |
|||||||||||||||
2.5 Influence des perturbations
Soit le système perturbé représenté par le schéma bloc ci-dessous :
Page 8 Emmanuel FARGES Ó EduKlub S.A.
Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la consultation individuelle et privée sont interdites.
Sciences Indusrielles
Systèmes linéaires continus invariants
Performance des systèmes asservis
|
P |
||||||||||
|
+ |
||||||||||
|
E |
+ |
e |
S |
|||||||
|
F1(p) |
F2(p) |
|||||||||
|
– |
+ |
|||||||||
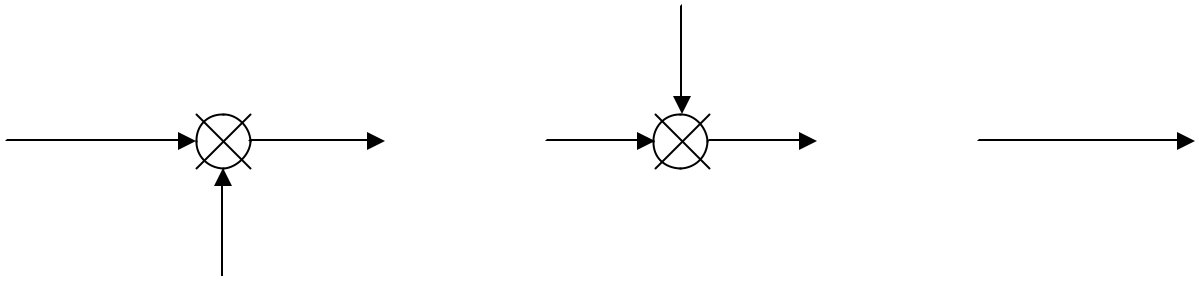
E est l’entrée du système, c’est à dire la consigne
S est la sortie du système, c’est à dire la réponse à l’entrée E
P est une seconde entrée du système appelée perturbation car elle est subie, c’est à dire qu’on ne la maîtrise pas : le vent , la houle, les courant dans le cas d’un pilote automatique de bateau chargé de maintenir le cap de l’embarcation.
- : est l’erreur du système puisque c’est la différence entre l’entrée E (ce que l’on veut faire) et la sortie S (ce que l’on a fait)
Plaçons nous dans le cas général pour les fonctions de transfert F1 et F2 :
|
K |
1 |
N |
( p) |
ìN |
( p )polynomeen p avec N |
(0) = 1 |
||||
|
C’est à dire : F ( p) = |
1 |
avec |
í 1 |
1 |
||||||
|
D1 ( p) |
( p )polynomeen p avec D1 (0) = 1 |
|||||||||
|
1 |
pa1 |
î D1 |
||||||||
|
Et : F ( p) = |
K |
2 |
N |
2 |
( p) |
avec |
ìN |
2 |
( p)polynomeenpavec N |
2 |
(0) |
= 1 |
||
|
í |
||||||||||||||
|
D 2 (p ) |
( p)polynomeenpavec D2 |
|||||||||||||
|
2 |
pa2 |
î D2 |
(0) |
=1 |
||||||||||
Il existe deux types d’erreur sur ces systèmes puisque l’on a deux types d’entrées différentes.
On peut donc décomposer l’erreur en deux :
Une erreur vis-à-vis de l’entrée, c’est à dire la consigne (à perturbation nulle) : e1
Une erreur vis-à-vis de la perturbation (à consigne nulle) : e2
On a alors : e = e1 + e2
Calculons e1 :
On peut refaire le schéma bloc avec une perturbation nulle :
|
e1 = E – S |
E |
+ |
e1 |
S |
||||||||
|
F1(p) F2(p) |
||||||||||||
|
S = F1 F2 e1 |
– |
|||||||||||
|
Donc |
e1 = |
E |
||||||||||
|
1 + F1 F2 |
||||||||||||
|
Calculons e2 |
: |
P |
||||||||||

On peut refaire le schéma bloc avec une entrée nulle :
|
+ |
||||||||||||
|
e2 |
S |
|||||||||||
|
F1(p) |
F2(p) |
|||||||||||
|
e2 = –S |
+ |
|||||||||||
|
– |
||||||||||||
|
S = F2 [ |
P + F1e |
2 ] |
||||||||||
|
Page 9 |
Emmanuel FARGES |
Ó EduKlub S.A. |
||||||||||

Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la consultation individuelle et privée sont interdites.
Sciences Indusrielles
Systèmes linéaires continus invariants
Performance des systèmes asservis
D’où : e2 = – F2 P
1+ F1 F2
Les erreurs vis-à-vis de l’entrée ayant déjà été abordées, on ne s’intéresse ici qu’à l’erreur statique vis-à-vis de la perturbation.
On soumet donc le système à une perturbation échelon (erreur statique), et on regarde quelle
|
est l’erreur générée : es 2 |
= lim e |
2 (t ) = lim pe |
2 ( p) |
|||||||||||||||||||
|
t ®¥ |
p®0 |
|||||||||||||||||||||
|
e s 2 |
= lim pe2 ( p) = lim p |
P (p )F2 ( p) |
avec |
P ( p) = |
P0 |
|||||||||||||||||
|
1+ F1 ( p)F2 ( p ) |
p |
|||||||||||||||||||||
|
p ®0 |
p®0 |
|||||||||||||||||||||
|
es 2 |
= lim |
P K |
2 |
p–a 2 |
= lim |
P K |
2 |
pa1 |
= lim |
P K |
2 |
pa1 |
||||||||||
|
0 |
0 |
0 |
||||||||||||||||||||
|
+ p(a 1 +a2 ) |
K 1 K2 |
|||||||||||||||||||||
|
p®0 1+ K K p-(a1 +a2 ) |
p ® 0 |
K K |
2 |
p®0 |
||||||||||||||||||
|
1 |
2 |
1 |
||||||||||||||||||||
Donc si on veut annuler l’erreur statique vis-à-vis d’une perturbation (ce qui est très intéressant étant donnée qu’en général on ne maîtrise pas cette perturbation) : il faut a1 ³ 1
Conclusion : Pour annuler l’erreur statique vis-à-vis d’une perturbation, il faut placer au moins un intégrateur avant celle-ci.
Page 10 Emmanuel FARGES Ó EduKlub S.A.
Tous droits de l’auteur des œuvres réservés. Sauf autorisation, la reproduction ainsi que toute utilisation des œuvres autre que la consultation individuelle et privée sont interdites.