1.Introduction
Le réseau Ethernet est basé sur le principe que l’émission d’une trame se fait dans les deux sens sur le bus afin que toutes les stations connectées au réseau puissent la recevoir. Il est basé sur le mode d’accès CSMA/CD ( Carrier Sens Multiple Accès with Collision Detection ), ce qui signifie détection de porteuse et accès multiple avec détection de collisions.
Les fonctions principales réalisées du CSMA/CD sont:
- Que l’ensemble des stations on les mêmes droits d’accès au réseau.
- Que chaque station écoute le réseau avant d’émettre, en détectant la présence d’une porteuse et donc d’une autre émission.
- Que chaque station après avoir émit vérifie que le signal généré n’est pas entré en collision avec un autre. Ceci est réalisé, par le transceiver en vérifiant que le signal, présent sur le média, n’a pas une trop grande amplitude.
2.Algorigramme de fonctionnement du mode d’accès CSMA/CD

3.Fonctionnement et normalisation du mode d’accès CSMA/CD
Le réseau Ethernet a une topologie en bus et donc toutes les stations sont connectées en parallèle sur le même support. Une trame émise, de façon bidirectionnelle, par une station est donc reçue par l’ensemble des postes du réseau.
1.Détection de porteuse
Lorsque qu’une station veut émettre, elle commence par vérifier la non présence d’un signal sur le média, c’est la phase de détection de la porteuse (Carrier Sens). Cette opération est réalisée par le tranceiver interne ou externe.
- Dans le cas ou le média est occupé la station attend en continuant la phase de détection de porteuse, jusqu’à ce que le média soit libre. A ce moment là, la station émet.
- Dans le cas ou le média était libre la station émet sa trame.
2.Le délai inter trame
Ce délai est respecté lorsque que la même station émet consécutivement deux trames. Elle permet la réinitialisation des processus des couches 1 et 2, et la stabilisation des signaux électrique sur le média. Ce délai est selon la norme 802.3 est de 96 bit-times
Le bit-times est l’unité de temps utilisé par la norme 802.3. Cette unité représente le temps nécessaire que met une station pour émettre un bit.
- Pour un débit de 10 Mb/s, ce temps est de 0,1 µs. Donc un bit-times correspondra
- 0,1 µs.
- Pour un débit de 100 Mb/s, ce temps est de 0,01 µs. Donc un bit-times correspondra
- 0,01 µs.
3.Détection de collision
La détection d’une porteuse était simple, la détection d’une collision l’est moins.
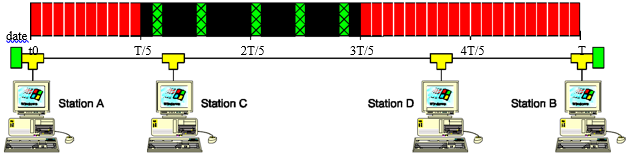
Nous allons considérer que nous avons la topologie de réseau suivante.

Les deux stations A et B étant les stations d’extrémité du réseau.
- 1ère étape
La station A veut émettre une trame vers la station D. Elle commence par vérifier que le média est libre, c’est le cas. Elle commence à émettre sa trame.

- 2ème étape
A la date T/5, la station B veut émettre une trame vers la station A. Elle commence par vérifier que le média est libre, ce qui est le cas puisque la trame provenant de la station A n’est pas encore arrivée à son niveau.

- 3ème étape
A la date 2T/5, les deux stations A et B émettent simultanément.

- 4ème étape
A la date 3T/5, les deux trames se rencontrent, il y a COLLISION.

- 5ème étape
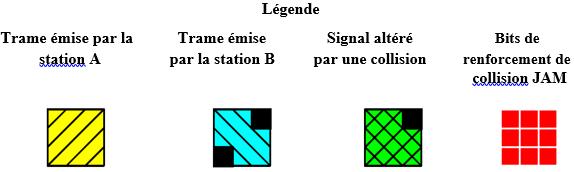
A la date 4T/5, malgré la collision les trames, qui sont maintenant altérées, continuent à se propager sur le média. Les stations continuent à émettre, car elles n’ont toujours pas détecté la collision, puisque les trames altérées ne leur sont pas encore parvenues.

- 6ème étape
A la date 5T/5, la station B détecte la collision. Alors elle annule son émission d’une trame, puis elle émet un JAM. Le JAM est un ensemble de 32 bits de renforcement de collision afin d’informer l’ensemble des stations présentes sur le réseau qu’il y à eu une collision.

- 7 ème étape
A la date 6T/5, la station A détecte la collision, alors elle aussi annule son émission émet un JAM

- 8ème étape
A la date 7T/5 la station D est informée de la présence d’une collision. Elle déduit que la trame qu’elle était entrain de traiter n’est plus exploitable, et donc elle arrête ce traitement.
- 9ème étape
Après que toutes les stations soit informé ( il faut que le JAM circule sur l’ensemble du réseau ) Toutes les stations arrêtent leurs émissions et ce mettent en attente pendant une durée aléatoire (dont le calcul sera détaillé par la suite ).Après cette attente les stations se remettent en position d’émission.
4.Le R.T.D. ( Round Trip Delay )
Une des données importantes pour la détection de collision est nommée le RTD ( Round Trip Delay ). Il représente le double de la durée maximum que met une trame pour parcourir la distance séparant les deux stations les plus éloignés.
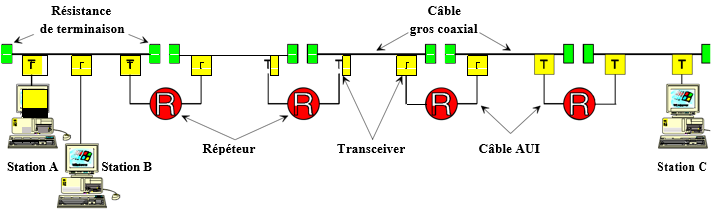
Le RTD a été déterminé avec une configuration maximale d’un réseau Ethernet
répondant à la norme 10 BASE 5: – 5 segments de 500 mètres, – 4 répéteurs.

Le RTD est la somme du temps total nécessaire pour effectuer les trois opérations suivantes:
- Temps que va mettre une trame pour se propager d’une station d’extrémité ( Station A ) à l’autre ( station C ).
Emission de la trame

Réception de la trame par la station C

Détection d’une éventuelle collision provoquée par cette trame à l’extrémité du réseau.
Collision à l’extrémité du réseau

Temps que va mettre le JAM ( bit de renforcement de collision ) pour se propager d’une station d’extrémité ( Station C ) à l’autre ( station B ), afin de d’informer l’ensemble des stations.
Réception du JAM par la station A

Le RTD a pour valeur 498,9 bit-times. Donc la durée du RTD sera de 49,89 µs, pour un réseau 10 Mb/s. Pour simplifier les calculs nous utiliserons la valeur de 512 bit-times, pour que la valeur du RTD, en bit-times, soit un multiple de deux, et donc le RTD a pour valeur 51,2 µs pour un réseau 10 Mb/s.
RTD (Round Trip Delay) = 512 bit-times
5.Traitement des collisions
Lors d’une collision, la sous-couche PHY indique celle-ci à la sous-couche MAC. La sous-couche MAC doit dans un premier temps transmettre une séquence de renforcement de collision, le JAM, afin que toutes les stations en émission puissent la détecter.
La sous-couche MAC doit ensuite tenter de retransmettre la trame après un délai d’attente aléatoire Ta déterminé par l’équation suivante:
Ta = R × Tb
Avec : – R est un nombre aléatoire tel que ; 0 ≤ R ≤ 2k
- k = min (N, 10);
- N est le nombre de tentatives de retransmission déjà effectuées;
- Tb est le temps de base.
Le temps de base est le temps le RTD ( 512 bit-times ) du réseau.
Le nombre d’essais de retransmission est au maximum de 16
4.Taille des trames Ethernet
Nous reprenons la configuration maximale du réseau Ethernet.
Supposons que la station A émette une trame à l’attention de la station B. La trame se propage d’abord jusqu’à la station B, celle-ci commence donc à la recevoir.
Cette trame continue à circuler sur le réseau et atteint la station C, la station d’extrémité. Si on prend le cas le plus défavorable cette station avait, juste avant vérifier que personne n’occupait le média, ce qui était le cas, et commence à émettre au moment ou la trame de la station A lui parvient.
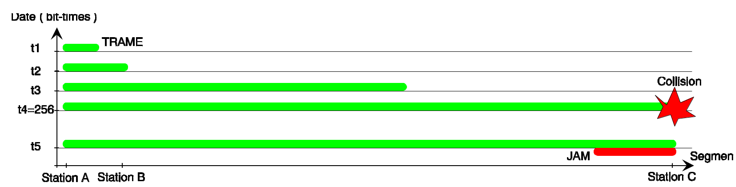
La station C détecte une immédiatement une collision et émet un JAM. Ce renforcement de collision se propage le long du réseau et arrive au niveau de la station B et de la station A.
Deux cas se présentent:
- Premier cas
La station A a fini son émission lorsque le JAM lui parvient. Elle ne peut pas savoir si cette collision la concerne ou pas, ou si autrement dit la station B a bien reçu la trame et donc elle ne sait pas si elle doit réémettre cette trame.

- Deuxième cas
La station A n’a pas fini son émission lorsque le JAM lui parvient et donc elle sait que la collision la concerne et qu’elle devra ultérieurement réémettre sa trame.

Ce deuxième cas est le plus favorable à une bonne détection des collisions. Il faut donc que la durée d’émission d’une trame soit toujours supérieure au temps maximum que celle -ci mettra pour se propager sur le réseau d’une extrémité à l’autre, plus le temps que mettra un JAM émis par la station d’extrémité pour parcourir l’ensemble du réseau. Cette durée correspond, par définition, au RTD (Round Trip Delay ), qui pour valeur 512 bit-times.
Sachant que pour émettre un bit il faut 1 bit-time, donc la longueur minimum d’une trame sera de 512 bits ce qui correspond à 64 octets.
Longueur minimum d’une trame Ethernet est de 64 octets.
La norme 802.3 définit aussi la longueur maximum d’une trame Ethernet.
Longueur maximum d’une trame Ethernet est de 1518 octets.